-
Notifications
You must be signed in to change notification settings - Fork 0
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
Showing
3 changed files
with
33 additions
and
4 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
|
|
@@ -9,7 +9,7 @@ parent: Cmd Description | |
|
|
||
|  | ||
|
|
||
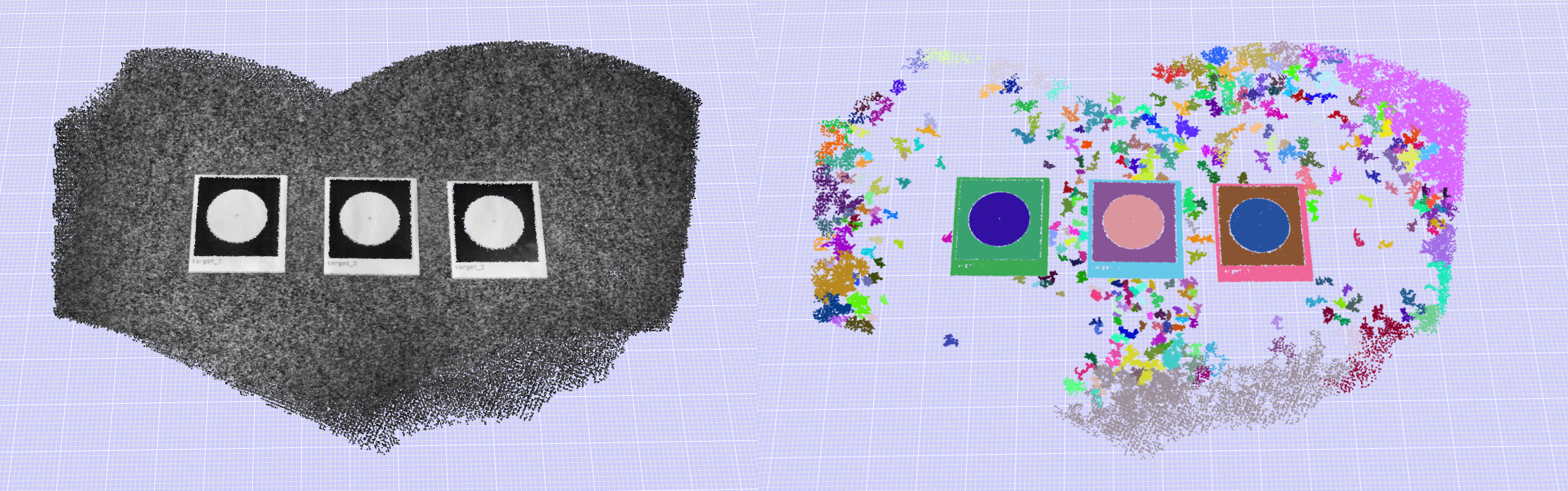
| <font size="2"><i> On the left: a gryscale cloud; on the right: the result of the color clustering. If you want to see an example of how the color clustering is used check out the <a href="[mailto:[email protected]](https://ibois-epfl.github.io/Cockroach-documentation/docs/tutorials/digital-twin-of-masonry-stone-wall-b/)">digital-twin-masonry-tutorial</a>. </i></font> | ||
| <font size="2"><i> On the left: a gryscale cloud; on the right: the result of the color clustering. If you want to see an example of how the color clustering is used check out the <a href="https://ibois-epfl.github.io/Cockroach-documentation/docs/tutorials/digital-twin-of-masonry-stone-wall-b/">digital-twin-masonry-tutorial</a>. </i></font> | ||
|
|
||
| This is a clustering technique based on color. It will cluster the pointcloud based on the color of the points . It is often useful to cluster a pointcloud based on color to separate different colored component of a pointcloud. Note that this command can be used also with *grayscale* colors as in the image. As many clustering techniques the command uses a [KNNsearch](https://en.wikipedia.org/wiki/K-nearest_neighbors_algorithm) to find the colors relations of neighbors of each point. | ||
|
|
||
|
|
||
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
{kind=link}
Loading
Sorry, something went wrong. Reload?
Sorry, we cannot display this file.
Sorry, this file is invalid so it cannot be displayed.